“动态环境下的语义视觉SLAM算法”最新研究成果
华春生,男,辽宁沈阳人,工学博士,辽宁大学信息学院研究员,主要研究方向为模式识别、计算机视觉、人机交互、智能机器人环境感知等。
同时定位与建图(Simultaneous Localization and Mapping, SLAM)被认为是智能机器人自主定位的重要技术,近年来以相机作为主要传感器的视觉SLAM得到了广泛关注。华春生团队多年来一直致力于该领域的研究工作。
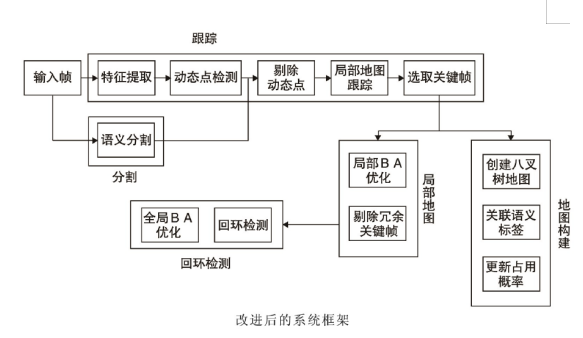
虽然目前有很多优秀的视觉SLAM算法,但是绝大部分算法都是基于在静态环境或近似静态纹理背景的假设下才能很好地运行。然而在更复杂的现实世界环境中,由于不能正确处理动态特征,受动态对象的干扰,会导致传统的SLAM算法位姿估计的精度降低,系统所构建的环境地图也缺乏准确性。华春生团队最新研究成果——动态环境下的语义视觉SLAM算法研究,提出一种动态环境下基于语义信息的视觉SLAM算法。算法基于ORB-SLAM2进行改进,在提高精度的同时增加系统的稳定性。在ORB-SLAM2的跟踪线程里嵌入动态点检测,另外增加了语义分割线程和地图构建线程。将语义分割网络提取的语义信息与动态点检测算法相结合,剔除动态特征点。最后通过稳定的静态特征点进行位姿估计,并且能够生成具有语义信息的三维语义地图,有助于机器人执行高级的交互任务。
文章出处:《辽宁大学学报(自然科学版)》2022年第4期
文章链接:
https://kns.cnki.net/kcms2/article/abstract?v=vdPasdvfHvuujBSTvF2BXMqbZ7YC3E44vAj8O4PRDOr6JXhlw9_HNiDQusfE63hxQImPowZHaWz4fYSjdLzUJc4fOnaCTvdk-VUUfzIMClc9wTd2SJPv66JQWRShQUJ2&uniplatform=NZKPT

 联系我们
联系我们
 友情链接
友情链接
